As you know that robots are a replica of humans. They seem like a computer model of a real thing, humans. But, are there any types of robots? Or Artificial Intelligence experts exaggerate the humanoid concept?
Robots, undoubtedly, have gained much prominence – Sophia is a humanoid who can hold a human-like conversation and can make many man-like facial expressions. Just to let you know, I am not going to talk about some types of robots who perform certain functions. But, I will discuss the seven species of novel robots that are a pillar of strength for Artificial Intelligence.
Seven Species of Robots by Dennis Hong
Dennis Hong is a full-time Professor and the Founder Director of RoMela that is a Robotics & Mechanisms Laboratory located at Virginia Tech. He is the inventor of seven award-winning humanoids called:
- STriDER
- IMPASS
- CLIMBeR
- LEMUR
- ChiMERA
- RAPHaEL
- HyDRAS
Let’s talk about those seven types of robots by Dennis Hong and learn why he was awarded the prestigious Faculty Early Career Development award in 2007 from the National Science Foundation.
1- STriDER
So, the first from the types of robots of discussion is STriDER. Dennis believes that the name signifies a ‘self-excited Tripedal Dynamic Experimental Robot.’ He defines it as a three-legged robot whose design is inspired by nature.
Have you ever seen an animal that has three legs? Contrary to expectations, there is no such animal in nature. So why does he calls this a biologically inspired robot? Unlike other dynamic walking machines, this unusual machine can change directions while walking.
2- IMPASS
The second from the types of robots is called IMPASS. As per Dennis, it stands for Intelligent Mobility Platform with Actuated Spoke System. It is a wheel-leg hybrid robot; it uses a stance called the ‘reactive approach.’
Dennis defines this approach in such a way: ‘By utilizing rimless wheels with individually actuated spokes, it can follow the contour of uneven surfaces like tracks and step over large obstacles like legged vehicles while retaining the simplicity of wheels.’
This robot can be used for search-and-rescue missions, scientific exploration, and anti-terror response applications.

3- CLIMBeR
The third from the types of robots is called CLIMBeR. It stands for ‘Cable-suspended Limbed Intelligent Matching Behavior Robot.’
NASA’s Mars exploration program is about finding scientific information by utilizing robots. The current rovers they sent to Mars, unfortunately, couldn’t get there. Inspired by that idea, Dennis tried to invent a bot that could climb a structured cliff environment. The CLiMBer is the result of that effort!
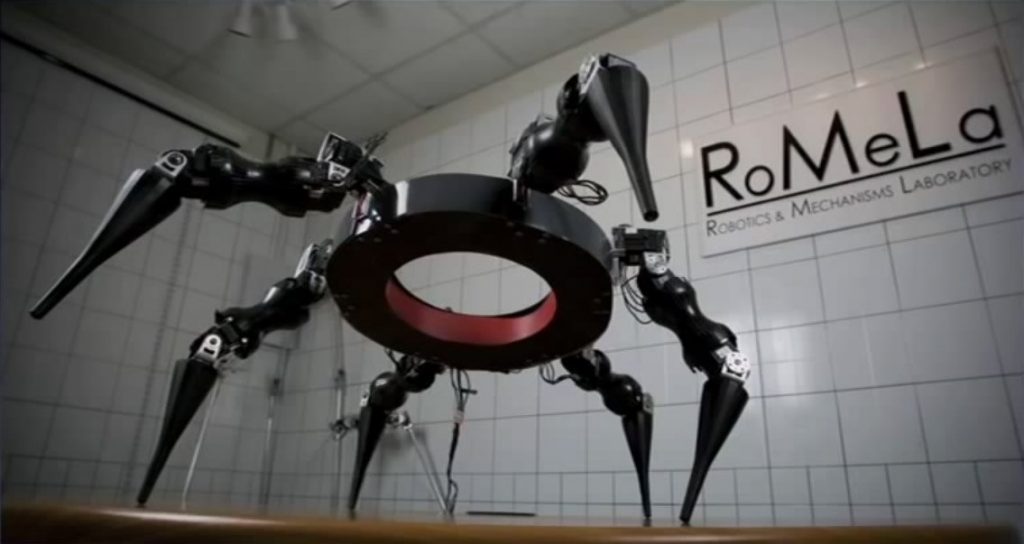
4- MARS
Five years ago, Dennis Hong worked at NASA JPL as a faculty fellow during the summer. A six-legged robot was already available there and they called it LEMUR. This MARS is based on that LEMUR.
MARS stands for Multi-Appendage Robotic System, a hexapod robot fabricated out of carbon fiber and aluminum. The goals and objectives of MARS are:
- Study and inspect biological neuron models
- Create a powerful simulation environment
- Figure out aspects of walking and integrate them into the neural network
- Design neurons/networks and specify the internal current and synaptic conductances
- Prove network and fine-tune its operation
5- ChiMERA
Dennis developed an amoeba-inspired robot that could move by using a technique called whole-skin locomotion and named it ChiMERA. The robotic locomotion research was conducted not only with multi-legged robots but also with bots having no legs at all.
Dennis explained some technical work in a TED talk. I would like to quote his exact words here: “ChiMERA stored potential energy in the elastic skin to make it move or use active tension cords to make it move forward and backward. He also has been working with some scientists and engineers from UPenn to come up with a chemically actuated version of this amoeba robot. He did something to something, and just like magic, it moves. ‘The Blob.’”
6- RAPHaEL
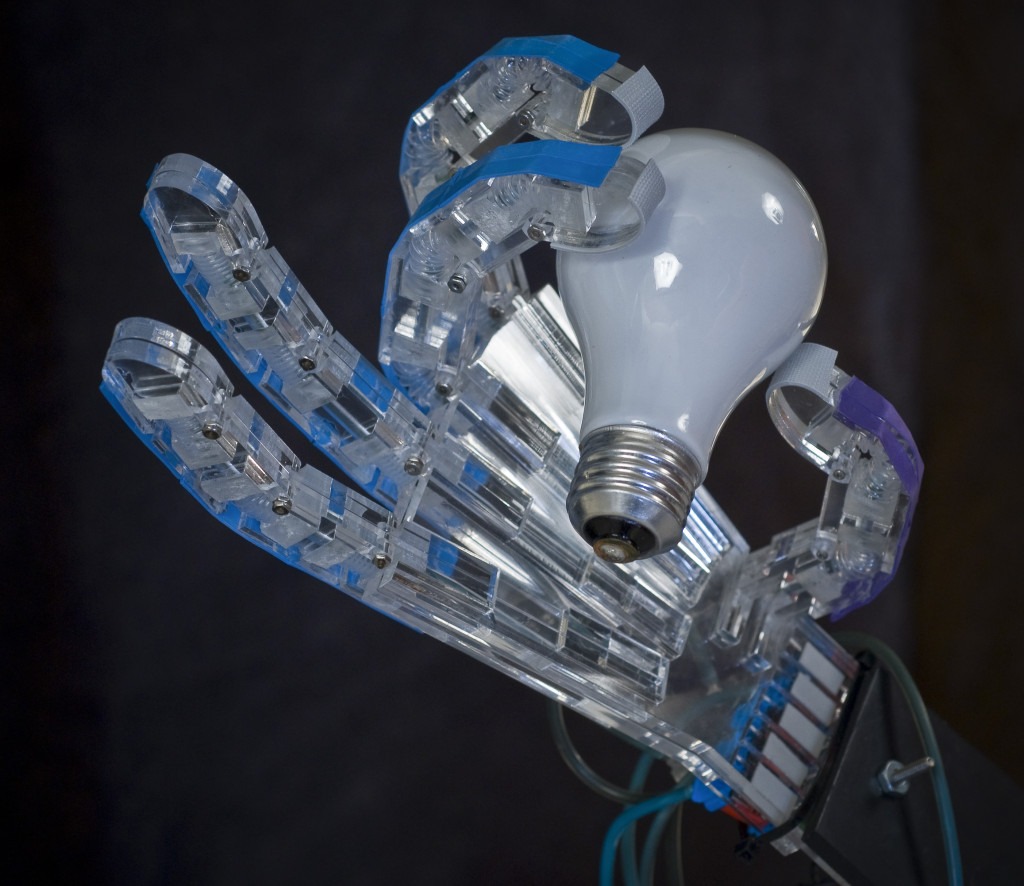
RAPHaEL is Dennis’s recent work. It stands for ‘Robotic Air-Powered Hand with Elastic Ligaments.’
He believes that the robotic hands available in the market are quite expensive. So, he wanted to tackle this problem by introducing an unorthodox bot. He, instead of using electric motors and electromechanical actuators used compressed air.
You can change the force by changing the air pressure. Furthermore, it can easily crush an empty soda can. Pick up very delicate objects like a raw egg, or even a lightbulb.
The best part: it took him only 200 dollars to make its first prototype. Brilliant!
7- HyDRAS
HyDRAS is a snake-bot; it’s called ‘Hyper Degrees-of-freedom Robotic Articulated Serpentine.’
It’s a 12-degrees-of-freedom robotic arm that can climb structures. Its software system provides simulation, visualization, and advanced control of robotic manipulator arms using real-time genetic algorithms.

Technology never stays still. Especially if it comes to robots. Researches are always on the go to present ideas that are unusual, abnormally weird, yet useful.
What do you think of these seven types of robots? Arent these species super cool?








0 Comments